









Classic 6 centric SoftGripper





NEW
TOP
Introduction:
The SoftGripper are lightweight, easy to operate and have no sharp edges. The core of our grippers are the fingers. They adapt to the shape of any object without damaging the surface. The main advantages are the low weight, the speed and the capability to work with all kinds of food. Our pneumatically driven fingers are made of FDA-approved silicon rubber.Adapters are available for every robot on the market. The shape of the object to be gripped determines the base, which is an essential part of the gripper. A round object needs a centric base, an elongated or rectangular shape needs a parallel base. We offer different types of bases with a different number of fingers and different angles.
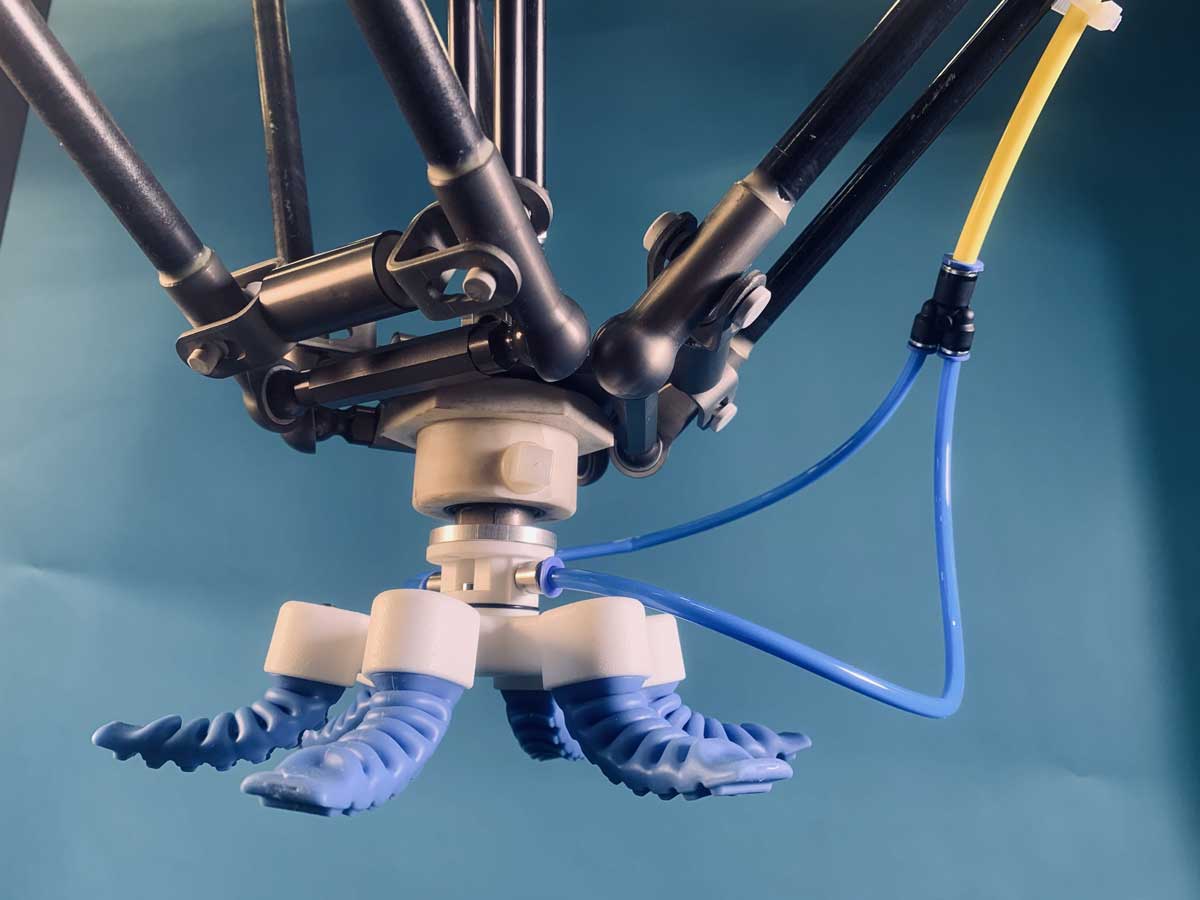
For special applications, we´ll gladly design a completely individual base for your task in shortest time. You will be surprised how safe and easy one SoftGripper can handle a broad range of objects due to its flexibility. So it is not necessary to have different grippers for differently shaped object. Additionally a vacuum suction cup or a spacer can be mounted centrically.
- Integrated and very light design
- Ideal for gripping objects of various types
- Optional: Special coating and screws for hygienically work environments
- Centric and parallel grippers available
- Connection for an optional suction cup or spacer
- Customized grippers available (number of fingers and finger orientation)
- An individual gripper design for your special task possible.
Typical objects for 6 centric fingers:
Spherical or cylindricalFeed size 5 mm - 120 mm
Weight <1200 g
Typical gripping tasks: Dough, rolls, peppers, oranges, cabbage, doughnuts, meat medallions and children's toys.
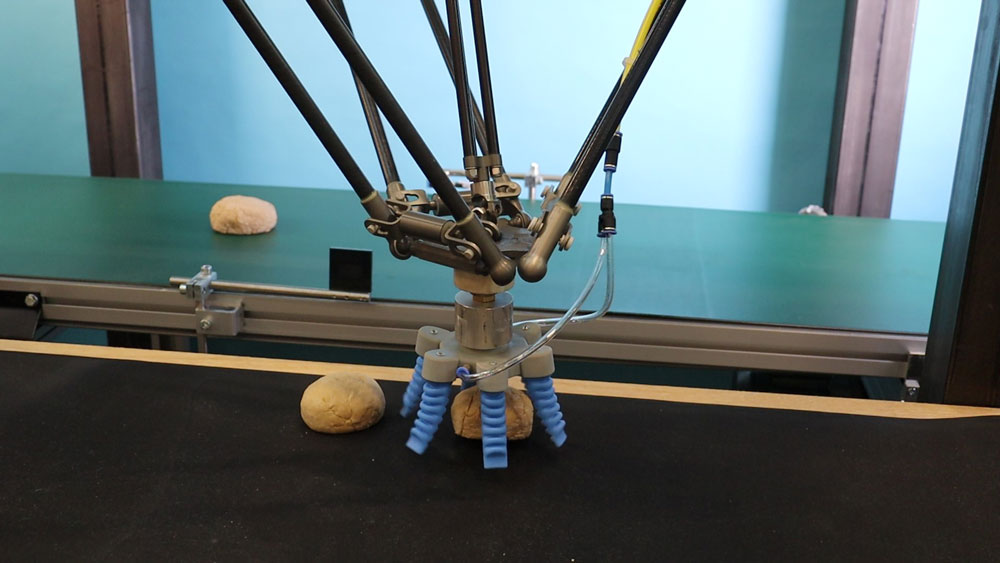
SoftGripper in Action
Sample Application: Bakery Automation
This gripper was used in the whitepaper series about what processes can be automated in modern bakeries on any stage from local bakeries over SMEs to large bakery product manufacturers.
In the case of the Six Finger Centric Gripper, handling of frozen and non-frozen dough was presented with optimal parameters for high-speed delta robots:
Artikel Whitepaper
-
Catalog and Operating Instructions :
-
Learn more about our products in our catalog:
Download CatalogFind more information about gripper assembly and required pneumatic components in the operating manual:
Operating Manual: Grippers
-
CAD Files and Product Presentations :
-

Being logged in has its advantages!
Detailed product information and presentations are available after logging in!
We also provide CAD files for all grippers.Please log in to access them:
Login