



Gorilla 2x1 parallel SoftActuator

NEW
SoftActuators - The key to automation
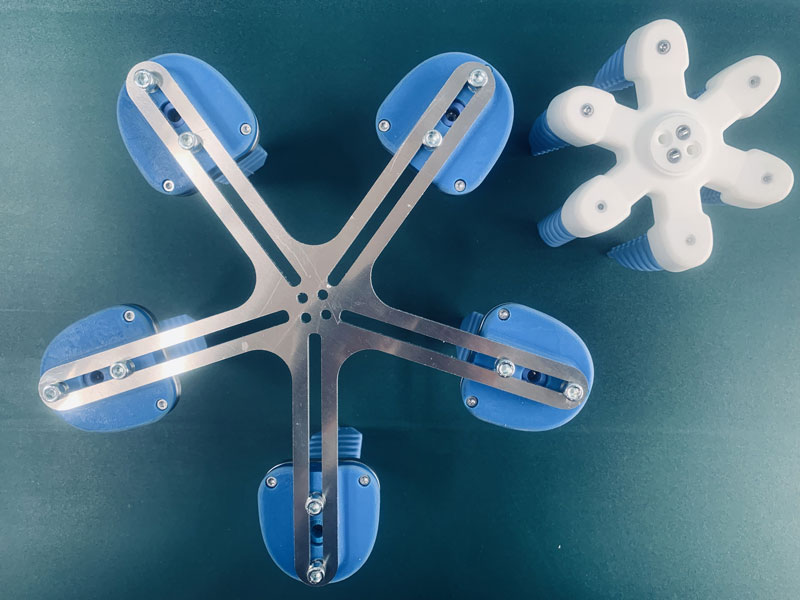
We supply the SoftActuators, you choose the shape of your base. Whether you prefer aluminum construction profiles or curved plates, they are manufactured to fit. Our proven pneumatically driven fingers are made of FDA-approved silicone rubber. You can mount them on any EOAT setup without the need for a special base. Our SoftActuators are hygienically designed and easy to clean.Which GorillaFinger for Which Application?
SoftGripping gripper fingers are ideal for handling delicate and irregularly shaped products. They provide a gentle yet secure grip and are optimized for use in the packaging, food, and automation industries.
Variants:
- With Studs & Hook – Provides maximum grip on uneven or slippery surfaces.
- Without Studs, With Hook – Suitable for smooth and delicate products, offering additional enclosure.
- Without Studs & Without Hook – Designed for uniformly shaped and easy-to-grip items.
Selection Guide:
| Grip Object Property | Recommended Variant |
|---|---|
| Irregular / Slippery | With Studs & Hook |
| Smooth & Delicate | Without Studs, With Hook |
| Uniformly Shaped | Without Studs & Without Hook |
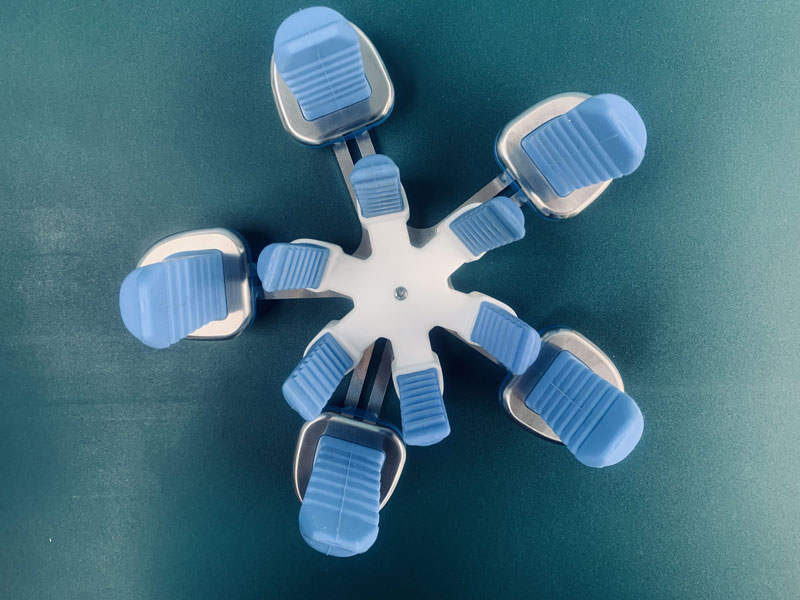
GorillaFinger SoftActuator - For mesh, large and heavy objects
Our GorillaFingers are ideal for handling netted goods, such as 2.5 kg bags of: Potatoes, carrots or even apples. Furthermore, the large and wide fingers allow you to gently grip pasta due to their large surface area. Here are a few examples:| Apple bag | Potato bag |
|---|---|
 |
 |
Use cases:
- For engineers who want to build their own EOAT.
- For a large variety of objects
- For easy adaptation when gripping objects change
- In setups for easy prototyping
- For determining the optimal dimensions of a stationary system
If you need something special, like 4 or more fingers or actuators with larger or smaller finger spacing, just contact us, we will build it for you within 2 weeks.
For more details, please check the product page for SoftActuators.
GorillaFinger SoftGripper in action
Comparison to the HumanFinger SoftActuator
Compared to our smaller finger size, the GorillaFingers are for larger and heavier objects. In addition to net goods, cabbages, bottles and melons are good targets for this finger shape.Here is a series of pictures that create a size comparison:

-
Catalog and Operating Instructions :
-
Learn more about our products in our catalog:
Download CatalogFind more information about gripper assembly and required pneumatic components in the operating manual:
Operating Manual: Grippers
-
CAD Files and Product Presentations :
-

Being logged in has its advantages!
Detailed product information and presentations are available after logging in!
We also provide CAD files for all grippers.Please log in to access them:
Login